Prekidač za ograničavanje oscilacija zavojnice žice

-

Robusno kućište
-

Pouzdana akcija
-

Poboljšani život
Opis proizvoda
Renew-ovi mikro granični prekidači serije RL8 su izdržljiviji i otporniji na teške uslove okoline, sa mehaničkim vijekom trajanja do 10 miliona operacija. Ovo je velika prednost u odnosu na standardne prekidače, što je glavni razlog zašto ih bira teška oprema. Zahvaljujući fleksibilnoj opružnoj šipki, granični prekidači sa žičanim vrhom i oscilujućim zavojnicama mogu se upravljati u više smjerova (osim aksijalnih smjerova), prilagođavajući se neusklađenosti. Savršeno su pogodni za detekciju objekata koji se približavaju iz različitih uglova. Plastični i žičani vrh dostupni su za različite primjene.
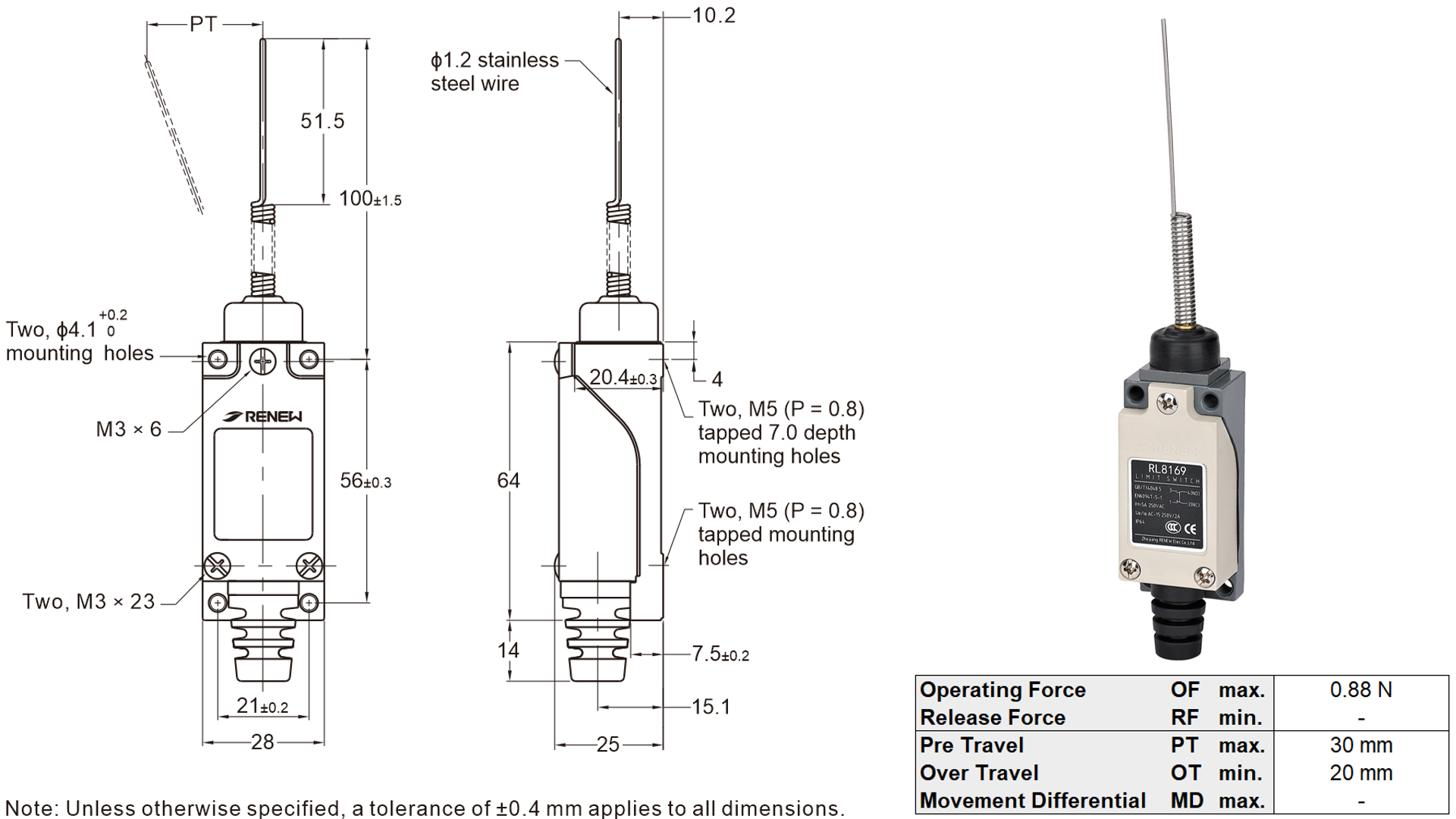
Dimenzije i radne karakteristike
Opći tehnički podaci
| Amperska ocjena | 5 A, 250 VAC |
| Otpor izolacije | 100 MΩ min. (pri 500 VDC) |
| Otpor kontakta | 25 mΩ maks. (početna vrijednost) |
| Dielektrična čvrstoća | Između kontakata istog polariteta 1.000 VAC, 50/60 Hz tokom 1 minute |
| Između metalnih dijelova koji provode struju i uzemljenja, te između svakog terminala i metalnih dijelova koji ne provode struju 2.000 VAC, 50/60 Hz tokom 1 minute | |
| Otpornost na vibracije u slučaju kvara | 10 do 55 Hz, dvostruka amplituda 1,5 mm (kvar: maks. 1 ms) |
| Mehanički vijek trajanja | 10.000.000 operacija min. (120 operacija/min) |
| Električni vijek trajanja | Min. 300.000 operacija (pod nazivnim otpornim opterećenjem) |
| Stepen zaštite | Opšta namjena: IP64 |
Aplikacija
Renew-ovi minijaturni granični prekidači igraju ključnu ulogu u osiguravanju sigurnosti, preciznosti i pouzdanosti različitih uređaja u različitim oblastima. Evo nekih popularnih ili potencijalnih primjena.

Ovi granični prekidači se obično koriste u mašinama za pakovanje u modernim skladištima i pametnim fabrikama za detekciju nepravilno oblikovanih paketa koji se kreću po transportnim trakama. Fleksibilna šipka se savija u oblik paketa kako bi se aktivirao prekidač. Takođe se mogu koristiti u robotici i sistemima automatizacije za detekciju krajnjeg položaja robotskih ruku ili pokretnih dijelova koji možda nisu savršeno poravnati svaki put.












